I worked on desktop VR simulators for training in a variety of vocational skills like plumbing and carpentry on a project funded by the Indian government’s Ministry of Human Resources and Development. The simulators are enabled with haptic force feedback simulating contact forces between tools and materials utilizing both haptic devices developed at AMMACHI labs (APTAH for linear 1DOF feedback, CHAKRA for rotary 1DOF feedback) as well as commercial devices like the Novint Falcon. I worked primarily on the graphics and software interface (using OpenGL, Unity, CHAI3D and Qt). Under the guidance of Prof. Ken Salisbury of Stanford University (one of the founding fathers of the field of computer haptics), my team also built a low-cost underactuated haptic device called MUSHAK. You can see glimpses of my work below. For more details please visit https://ammachilabs.org/haptic-simulators/.

Planing simulator teaching the rhythm and pressure variations needed to achieve a smooth and even finish
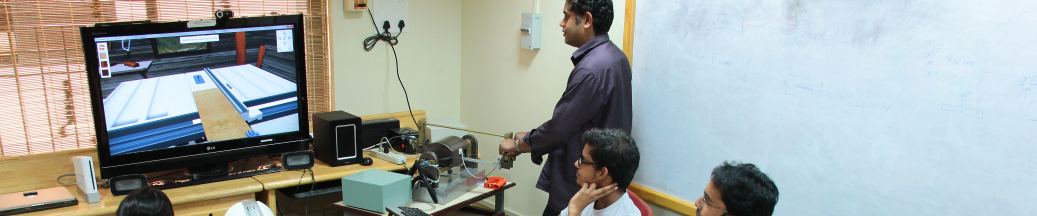
Tablesaw simulator teaching basic safety and procedural skills involved in dado, rip, bevel and cross cuts
Prototype metal filing simulator with the Novint Falcon
User trains in the use of a drillpress with haptic feedback.